|
ifw-fcf
2.0.0
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Groups Pages
|
ifw-fcf
2.0.0
|
The drotControllerData struct. More...
#include <drotLcsIf.hpp>
Public Member Functions | |
| DrotControllerData () | |
| virtual | ~DrotControllerData () |
| void | SetData (const DrotControllerData &data) |
| virtual std::string | GetErrorText () const |
| virtual std::string | GetSubstateStr () const |
| short | GetTrackingMode () const |
| void | SetTrackingMode (short mode) |
| double | GetAlpha () const |
| void | SetAlpha (double alpha) |
| double | GetDelta () const |
| void | SetDelta (double delta) |
| double | GetAngleOnSky () const |
| void | SetAngleOnSky (double angle) |
 Public Member Functions inherited from fcf::devmgr::motor::MotorControllerData Public Member Functions inherited from fcf::devmgr::motor::MotorControllerData | |
| MotorControllerData () | |
| virtual | ~MotorControllerData () |
| double | GetActualPos () const |
| void | SetActualPos (double position) |
| double | GetPosError () const |
| void | SetPosError (double pos_error) |
| double | GetActualVel () const |
| void | SetActualVel (double velocity) |
| double | GetTargetPos () const |
| void | SetTargetPos (double position) |
| double | GetTargetVel () const |
| void | SetTargetVel (double velocity) |
| double | GetScaleFactor () const |
| void | SetScaleFactor (double scale) |
| bool | GetBrakeFlag () const |
| void | SetBrakeFlag (bool flag) |
| bool | GetEnableFlag () const |
| void | SetEnableFlag (bool flag) |
| bool | GetLockFlag () const |
| void | SetLockFlag (bool flag) |
| int | GetMode () const |
| void | SetMode (int mode) |
| bool | GetReadyFlag () const |
| void | SetReadyFlag (bool flag) |
| bool | GetInPositionFlag () const |
| void | SetInPositionFlag (bool flag) |
| short | GetInfoData1 () const |
| void | SetInfoData1 (short info) |
| short | GetInfoData2 () const |
| void | SetInfoData2 (short info) |
| bool | GetSignalFlag (Signal signal) const |
| void | SetSignalFlag (Signal signal, bool flag) |
| void | SetData (const MotorControllerData &data) |
| Public Member Functions inherited from fcf::devmgr::common::DeviceControllerData | |
| DeviceControllerData () | |
| virtual | ~DeviceControllerData () |
| int | GetState () const |
| void | SetState (int state) |
| int | GetSubstate () const |
| std::string | GetStateStr () const |
| void | SetSubstate (int subtate) |
| bool | GetLocalFlag () const |
| void | SetLocalFlag (bool local_flag) |
| int | GetErrorCode () const |
| void | SetErrorCode (int error_code) |
| void | SetData (const DeviceControllerData &data) |
Protected Attributes | |
| short | m_tracking_mode |
| double | m_alpha |
| double | m_delta |
| double | m_angle_on_sky |
| Protected Attributes inherited from fcf::devmgr::motor::MotorControllerData | |
| double | m_target_pos |
| double | m_actual_pos |
| double | m_pos_error |
| double | m_actual_vel |
| double | m_target_vel |
| double | m_scale_factor |
| bool | m_brake |
| bool | m_enabled |
| bool | m_locked |
| int | m_mode |
| bool | m_ready |
| bool | m_in_position |
| int | m_info_data1 |
| int | m_info_data2 |
| std::vector< bool > | m_signals |
| Protected Attributes inherited from fcf::devmgr::common::DeviceControllerData | |
| int | m_state |
| int | m_substate |
| bool | m_local |
| int | m_error_code |
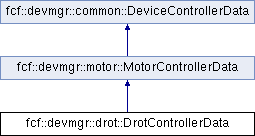
The drotControllerData struct.
This structure is used store the status information about the drot. The drotLcsIf class will read the drot status information from the controller and it will store it in this structure.
| fcf::devmgr::drot::DrotControllerData::DrotControllerData | ( | ) |
|
virtual |
|
inline |
|
inline |
|
inline |
|
inlinevirtual |
Reimplemented from fcf::devmgr::motor::MotorControllerData.
|
inlinevirtual |
Reimplemented from fcf::devmgr::motor::MotorControllerData.
|
inline |
|
inline |
|
inline |
| void fcf::devmgr::drot::DrotControllerData::SetData | ( | const DrotControllerData & | data | ) |
|
inline |
|
inline |
|
protected |
|
protected |
|
protected |
|
protected |
 1.8.5
1.8.5