Class for implementing CCF Data Publishers. More...
#include <pubBase.hpp>
Public Member Functions | |
| PubBase (const std::string &proc_thread_name, const std::string &pub_thread_name) | |
| PubBase () | |
| virtual | ~PubBase () |
| void | Initialise () |
| bool | GetInitialised () const |
| void | Dismantle () |
| void | SetEnabled (const bool enabled) |
| bool | GetEnabled () const |
| const std::string & | GetProcThreadName () const |
| const std::string & | GetPubId () const |
| const std::string & | GetPubThreadName () const |
| void | Publish (DataFrame &frame, const bool force) |
| PubType | GetPublisherType () const |
| void | Activate () |
| virtual void | ActivateUser () |
| void | Deactivate () |
| virtual void | DeactivateUser () |
| void | SetActivated (const bool activated) |
| bool | GetActivated () const |
| virtual void | CheckForDeactivationUser () |
| PublisherStatus & | GetPubStatus () |
| void | EstimateExecution (double &duration, int64_t &nb_of_frames) |
| void | GetPubStatus (PublisherStatus &pub_stat) const |
| Make a snapshot of the current Publisher Status object. More... | |
| virtual void | InitialiseUser () |
| virtual void | DismantleUser () |
| virtual void | PublishUser (DataFrame &frame) |
| virtual void | CreateObjectUser (const std::string &proc_thread_name, const std::string &pub_thread_name, PubBase **new_object) |
| virtual void | EstimateExecutionUser (double &duration, int64_t &nb_of_frames) |
| void | ResetDbStatus () const |
| Update status for a given Publisher Thread in the OLDB. More... | |
| void | UpdateDbStatus () const |
| std::string | ToString () const |
 Public Member Functions inherited from ccf::Base Public Member Functions inherited from ccf::Base | |
| Base () | |
| ~Base () | |
| const std::string & | GetClassName () const |
| Return the allocated name of the class. More... | |
| log4cplus::Logger & | Loggger () |
| Return reference to logger used in this context. More... | |
Static Public Member Functions | |
| static const std::string & | GenId (const std::string &proc_thread_name, const std::string &pub_thread_name) |
| Generate an ID for the Publisher. More... | |
| template<class TYPE > | |
| static void | AddPubFactoryObj (TYPE &pub_factory_obj) |
| Static method to register a Data Publisher factory object in the internal registry. More... | |
| static const std::map< std::string, std::shared_ptr< PubBase > > & | GetPubFactoryObjs () |
| Generate vector with references to the Publisher Factory Objects registered. More... | |
| static void | CreatePubObj (const std::string &class_name, const std::string &proc_thread_name, const std::string &pub_thread_name, PubBase **new_object) |
| static void | GetPubObj (const std::string &proc_thread_name, const std::string &pub_thread_name, PubBase **pub_obj, const bool initialise=true) |
| static void | GetPubObjs (std::vector< PubBase * > &pub_objs) |
| Get reference to all Data Publisher Objects registered. More... | |
| static bool | HasPubObj (const std::string &proc_thread_name, const std::string &pub_thread_name, PubBase **pub_obj) |
| Check if a Publisher object is defined. More... | |
| Static Public Member Functions inherited from ccf::Base | |
| static ccf::mptk::Manager & | Mptk () |
| Return reference to internal MPTK instance (singleton). More... | |
| static void | SetLogLevel (const ccf::LogLevel log_level) |
| Set the log level. More... | |
| static ccf::LogLevel | GetLogLevel () |
| Return the current CCF log level. More... | |
Protected Attributes | |
| PubType | m_publisher_type |
| bool | m_initialised |
| bool | m_setup_enabled |
| bool | m_stat_active |
| Protected Attributes inherited from ccf::Base | |
| log4cplus::Logger | m_logger |
Additional Inherited Members | |
| Protected Member Functions inherited from ccf::Base | |
| void | SetClassName (const std::string &class_name) |
| Set the name of the class in question. More... | |
| void | SetLogger (log4cplus::Logger &logger) |
| Set reference to logger used in this context. More... | |
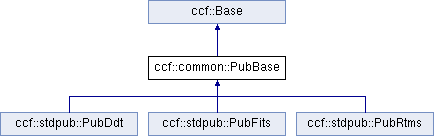
Detailed Description
Class for implementing CCF Data Publishers.
Constructor & Destructor Documentation
◆ PubBase() [1/2]
| ccf::common::PubBase::PubBase | ( | const std::string & | proc_thread_name, |
| const std::string & | pub_thread_name | ||
| ) |
◆ PubBase() [2/2]
| ccf::common::PubBase::PubBase | ( | ) |
◆ ~PubBase()
|
virtual |
Member Function Documentation
◆ Activate()
| void ccf::common::PubBase::Activate | ( | ) |
◆ ActivateUser()
|
virtual |
Reimplemented in ccf::stdpub::PubFits.
◆ AddPubFactoryObj()
|
inlinestatic |
Static method to register a Data Publisher factory object in the internal registry.
◆ CheckForDeactivationUser()
|
virtual |
Reimplemented in ccf::stdpub::PubFits.
◆ CreateObjectUser()
|
virtual |
◆ CreatePubObj()
|
static |
Static method to allocate and register a Data Publisher of the given type. A factory object of the given type (classname) shall be defined in the factory object registry (see ccf::common::PubBase::AddPubFactoryObj()). Each Data Publisher object instance shall be allocated before entering operations (data acquisition).
◆ Deactivate()
| void ccf::common::PubBase::Deactivate | ( | ) |
◆ DeactivateUser()
|
virtual |
Reimplemented in ccf::stdpub::PubFits.
◆ Dismantle()
| void ccf::common::PubBase::Dismantle | ( | ) |
◆ DismantleUser()
|
virtual |
Reimplemented in ccf::stdpub::PubRtms, and ccf::stdpub::PubDdt.
◆ EstimateExecution()
| void ccf::common::PubBase::EstimateExecution | ( | double & | duration, |
| int64_t & | nb_of_frames | ||
| ) |
Provide an estimate for the duration and number of frames to be stored during a Recording Session according to the present setup.
◆ EstimateExecutionUser()
|
virtual |
Reimplemented in ccf::stdpub::PubFits.
◆ GenId()
|
static |
Generate an ID for the Publisher.
◆ GetActivated()
| bool ccf::common::PubBase::GetActivated | ( | ) | const |
◆ GetEnabled()
| bool ccf::common::PubBase::GetEnabled | ( | ) | const |
◆ GetInitialised()
| bool ccf::common::PubBase::GetInitialised | ( | ) | const |
◆ GetProcThreadName()
| const std::string & ccf::common::PubBase::GetProcThreadName | ( | ) | const |
◆ GetPubFactoryObjs()
|
static |
Generate vector with references to the Publisher Factory Objects registered.
◆ GetPubId()
| const std::string & ccf::common::PubBase::GetPubId | ( | ) | const |
◆ GetPublisherType()
| PubType ccf::common::PubBase::GetPublisherType | ( | ) | const |
◆ GetPubObj()
|
static |
Static method to get the address of a Data Publisher object with the given name and ID. If an object with this name/ID does not exist, it is automatically created. If "initialise" is true (default value), the object is initialised, i.e., the configuration reloaded.
◆ GetPubObjs()
|
static |
Get reference to all Data Publisher Objects registered.
◆ GetPubStatus() [1/2]
| PublisherStatus & ccf::common::PubBase::GetPubStatus | ( | ) |
Get reference to internal Publisher Status object. Although all set-methods are semaphore protected, it shall be used with care.
◆ GetPubStatus() [2/2]
| void ccf::common::PubBase::GetPubStatus | ( | PublisherStatus & | pub_stat | ) | const |
Make a snapshot of the current Publisher Status object.
◆ GetPubThreadName()
| const std::string & ccf::common::PubBase::GetPubThreadName | ( | ) | const |
◆ HasPubObj()
|
static |
Check if a Publisher object is defined.
◆ Initialise()
| void ccf::common::PubBase::Initialise | ( | ) |
◆ InitialiseUser()
|
virtual |
Reimplemented in ccf::stdpub::PubRtms, ccf::stdpub::PubFits, and ccf::stdpub::PubDdt.
◆ Publish()
| void ccf::common::PubBase::Publish | ( | DataFrame & | frame, |
| const bool | force | ||
| ) |
◆ PublishUser()
|
virtual |
Reimplemented in ccf::stdpub::PubRtms, ccf::stdpub::PubFits, and ccf::stdpub::PubDdt.
◆ ResetDbStatus()
| void ccf::common::PubBase::ResetDbStatus | ( | ) | const |
Update status for a given Publisher Thread in the OLDB.
◆ SetActivated()
| void ccf::common::PubBase::SetActivated | ( | const bool | activated | ) |
◆ SetEnabled()
| void ccf::common::PubBase::SetEnabled | ( | const bool | enabled | ) |
◆ ToString()
| std::string ccf::common::PubBase::ToString | ( | ) | const |
◆ UpdateDbStatus()
| void ccf::common::PubBase::UpdateDbStatus | ( | ) | const |
Member Data Documentation
◆ m_initialised
|
protected |
◆ m_publisher_type
|
protected |
◆ m_setup_enabled
|
protected |
◆ m_stat_active
|
protected |
The documentation for this class was generated from the following files:
- common/src/include/ccf/common/pubBase.hpp
- common/src/pubBase.cpp