|
| | Drot (const std::string &filename, const std::string &name, fcf::devmgr::common::DataContext &data_ctx) |
| | Drot constructor.
|
| |
| virtual | ~Drot ()=default |
| | Default destructor.
|
| |
| void | CreateObjects (std::shared_ptr< fcf::devmgr::common::IDeviceConfig > config=nullptr) override |
| | Create object instances.
|
| |
| virtual void | Setup (const std::any &payload) override |
| | Executes a setup of the drot device.
|
| |
| virtual bool | IsSetupActive (const std::any &payload) const override |
| | Check if last setup message is still active.
|
| |
| virtual void | Status (const std::any &payload, std::string &buffer) override |
| | Obtain the status of the device.
|
| |
| virtual void | Status (bool end_acq, const core::dit::did::Did &dictionary, std::shared_ptr< CCfits::FITS > &fits_handle) override |
| | Obtain the status of the device.
|
| |
| virtual void | UpdateStatus () override |
| | Update the status of the Drot device in the OLDB.
|
| |
| | Motor (const std::string filename, const std::string name, fcf::devmgr::common::DataContext &data_ctx) |
| | Motor constructor.
|
| |
| virtual | ~Motor ()=default |
| | Default destructor.
|
| |
| void | CreateObjects (std::shared_ptr< fcf::devmgr::common::IDeviceConfig > config=nullptr) override |
| | Create object instances.
|
| |
| virtual void | Setup (const std::any &payload) override |
| | Executes a setup of the motor device.
|
| |
| virtual bool | IsSetupActive (const std::any &payload) const override |
| | Check if last setup message is still active.
|
| |
| virtual void | Status (const std::any &payload, std::string &buffer) override |
| | Obtain the status of the device.
|
| |
| virtual void | Status (bool end_acq, const core::dit::did::Did &dictionary, std::shared_ptr< CCfits::FITS > &fits_handle) override |
| | Obtain the status of the device.
|
| |
| void | GetStatusList (utils::bat::DbVector &cfg_status, const MotorControllerData &status_data) |
| | Get a vector with device status data.
|
| |
| virtual void | UpdateStatus () override |
| | Update the status of the motor device in the OLDB.
|
| |
| void | SetTargetNamedPosition (const std::string named_position) |
| |
| const std::string | GetTargetNamedPosition () |
| |
| | Device (const std::string filename, const std::string name, DataContext &data_ctx) |
| | Device abstract class constructor.
|
| |
| virtual | ~Device () |
| | Default destructor.
|
| |
| virtual bool | IsNotReady () const override |
| | Check if device is Standby/NotReady.
|
| |
| virtual bool | IsReady () const override |
| | Check if device is Standby/Ready.
|
| |
| virtual bool | IsOperational () const override |
| | Check if device is Operational.
|
| |
| virtual void | CheckHwFailure () const override |
| | Check if device is in failure state.
|
| |
| virtual bool | IsDisabling () const override |
| | Check if device is disablig.
|
| |
| virtual void | Init () override |
| | Executes a Init command.
|
| |
| virtual void | Enable () override |
| | Executes a Enable command.
|
| |
| virtual void | Disable () override |
| | Executes a Disable command.
|
| |
| virtual void | Stop () override |
| | Executes a Stop command.
|
| |
| virtual void | Reset () override |
| | Executes a Reset command.
|
| |
| void | GetStatusBuffer (const std::string &stat_prefix, const DeviceControllerData *const data, std::string &buffer) |
| |
| void | GetStatusHeader (const std::string &prefix, const core::dit::did::Did &dictionary, std::shared_ptr< CCfits::FITS > &fits_handle) |
| | Obtain the status of the device.
|
| |
| virtual void | Simulate (rad::AnyEvent const &last_event) override |
| | Executes a Simulat.
|
| |
| virtual void | StopSim (rad::AnyEvent const &last_event) override |
| | Executes a StopSim.
|
| |
| virtual void | Ignore (rad::AnyEvent const &last_event) override |
| | Executes a Ignore.
|
| |
| virtual void | StopIgn (rad::AnyEvent const &last_event) override |
| | Executes a StopIgn.
|
| |
| virtual void | HwReset (rad::AnyEvent const &last_event) override |
| | Executes a hardware reset command.
|
| |
| virtual void | HwInit (rad::AnyEvent const &last_event) override |
| | Executes a hardware init command.
|
| |
| virtual void | HwEnable (rad::AnyEvent const &last_event) override |
| | Executes a hardware enable command.
|
| |
| virtual void | HwDisable (rad::AnyEvent const &last_event) override |
| | Executes a hardware disable command.
|
| |
| virtual void | StartMonitoring () override |
| | Start device monitoring via OPCUA subscriptions.
|
| |
| virtual void | StopMonitoring () override |
| | Stop device monitoring.
|
| |
| virtual std::string | GetName () const noexcept override |
| | Get device id.
|
| |
| virtual std::string | GetLogName () const noexcept |
| | Get device id for logging purposes.
|
| |
| virtual std::shared_ptr< fcf::devmgr::common::DeviceLcsIf > | GetLcsIf () const noexcept |
| |
| virtual std::shared_ptr< fcf::devmgr::common::IDeviceConfig > | GetConfig () const noexcept |
| | Get a pointer of device configuration.
|
| |
| void | RegisterComm (std::shared_ptr< protocol::base::IComm > comm_if, protocol::base::Dispatcher<> &failure, protocol::base::Dispatcher<> &normal) |
| | Register a communication interface object.
|
| |
| virtual void | CreateObjects (std::shared_ptr< fcf::devmgr::common::IDeviceConfig > config=nullptr)=0 |
| | Create basic objects needed by the device class.
|
| |
| virtual void | RegisterComm (std::shared_ptr< protocol::base::IComm > comm_if, protocol::base::Dispatcher<> &failure, protocol::base::Dispatcher<> &normal)=0 |
| | Register a communication interface object.
|
| |
| virtual bool | IsNotReady () const =0 |
| | Check if device is Standby/NotReady.
|
| |
| virtual bool | IsReady () const =0 |
| | Check if device is Standby/Ready.
|
| |
| virtual bool | IsOperational () const =0 |
| | Check if device is Operational.
|
| |
| virtual void | CheckHwFailure () const =0 |
| | Check if device is in failure state.
|
| |
| virtual bool | IsDisabling () const =0 |
| | Check if device is disablig.
|
| |
| virtual void | Init ()=0 |
| | Executes a Init command.
|
| |
| virtual void | Enable ()=0 |
| | Executes a Enable command.
|
| |
| virtual void | Disable ()=0 |
| | Executes a Disable command.
|
| |
| virtual void | Stop ()=0 |
| | Executes a Stop command.
|
| |
| virtual void | Reset ()=0 |
| | Executes a Reset command.
|
| |
| virtual void | UpdateStatus ()=0 |
| | Update internal status by connecting to the LCS.
|
| |
| virtual void | Setup (const std::any &payload)=0 |
| | Executes a setup.
|
| |
| virtual bool | IsSetupActive (const std::any &payload) const =0 |
| | Check if setup is still active.
|
| |
| virtual void | Status (const std::any &payload, std::string &buffer)=0 |
| | Obtain the status of the device.
|
| |
| virtual void | Status (bool end_acq, const core::dit::did::Did &dictionary, std::shared_ptr< CCfits::FITS > &fits_handle)=0 |
| | Obtain the status of the device.
|
| |
| virtual void | Simulate (rad::AnyEvent const &last_event)=0 |
| | Executes a Simulat.
|
| |
| virtual void | StopSim (rad::AnyEvent const &last_event)=0 |
| | Executes a StopSim.
|
| |
| virtual void | Ignore (rad::AnyEvent const &last_event)=0 |
| | Executes a Ignore.
|
| |
| virtual void | StopIgn (rad::AnyEvent const &last_event)=0 |
| | Executes a StopIgn.
|
| |
| virtual void | HwReset (rad::AnyEvent const &last_event)=0 |
| | Executes a hardware reset command.
|
| |
| virtual void | HwInit (rad::AnyEvent const &last_event)=0 |
| | Executes a hardware init command.
|
| |
| virtual void | HwEnable (rad::AnyEvent const &last_event)=0 |
| | Executes a hardware enable command.
|
| |
| virtual void | HwDisable (rad::AnyEvent const &last_event)=0 |
| | Executes a hardware disable command.
|
| |
| virtual std::shared_ptr< DeviceLcsIf > | GetLcsIf () const noexcept=0 |
| | Get a pointer of device LCS interface.
|
| |
| virtual std::shared_ptr< IDeviceConfig > | GetConfig () const =0 |
| | Get a pointer of device configuration.
|
| |
| virtual void | StartMonitoring ()=0 |
| | Start device monitoring via OPCUA subscriptions.
|
| |
| virtual void | StopMonitoring ()=0 |
| | Stop device monitoring.
|
| |
| virtual void | WriteConfig ()=0 |
| | Write configuration into OLDB.
|
| |
| virtual std::string | GetName () const noexcept=0 |
| | Get device name.
|
| |
|
| void | GetStatusBuffer (const std::string &stat_prefix, const DrotControllerData *const data, std::string &buffer) |
| | Get status buffer.
|
| |
| void | GetStatusHeader (const std::string &prefix, const DrotControllerData *const data, bool end_acq, const core::dit::did::Did &dictionary, std::shared_ptr< CCfits::FITS > &fits_handle) |
| | Get device status for the data acquisition.
|
| |
| void | HandleAction (const std::shared_ptr< fcfif::DrotDevice > &drot) |
| |
| void | GetStatusBuffer (const std::string &stat_prefix, const MotorControllerData *const data, std::string &buffer) |
| | Get status buffer.
|
| |
| void | GetStatusHeader (const std::string &prefix, const MotorControllerData *const data, bool end_acq, const core::dit::did::Did &dictionary, std::shared_ptr< CCfits::FITS > &fits_handle) |
| | Get device status for the data acquisition.
|
| |
| void | HandleAction (const std::shared_ptr< fcfif::MotorDevice > &motor) |
| |
| bool | IsMsgForMe (const std::string &id) const noexcept |
| | Check if received message id is addressed to me.
|
| |
| void | UpdateDb (utils::bat::DbVector &vec) |
| | Update device database.
|
| |
| void | SetIgnore (bool flag) |
| | SetIgnore.
|
| |
| void | SetSimulation (bool flag) |
| | SetSimulation.
|
| |
| void | GetPrefix (const std::vector< std::string > prefix_list, std::string &prefix) const |
| | Get prefix for writing attributes to the DB.
|
| |
| std::string | GetCfgPrefix (const std::vector< std::string > prefix_list) const |
| |
| std::string | GetStatPrefix (const std::vector< std::string > prefix_list) const |
| |
| bool | CheckNameParam (const std::any &payload) |
| | Determine whether paramater is included (device name).
|
| |
| void | GetStatusList (utils::bat::DbVector &cfg_list, const DeviceControllerData &status) |
| |
| virtual void | WriteConfig () |
| | Write configuration into OLDB.
|
| |
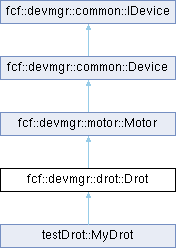
The Drot class.
This class handles the behaviour of a generic Drot device.
The Drot class have two auxiliary objects. One for managing the device configuration and the other one for managing the connection to the device controller running in the Local Control System (LCS). These two objects are created by a dedicated method. These objects inherits basic behaviours from their parent classes.
- See also
- DeviceConfig
-
DrotLcsIf
-
Motor
-
MotorLcsIf
 Public Member Functions inherited from fcf::devmgr::motor::Motor
Public Member Functions inherited from fcf::devmgr::motor::Motor