
M4
Contents
Requirements
M4 is a ~2.6 meters adaptive mirror mounted on a positioning system providing a first stage large stroke low frequencymechanical tilt, a two dimensions rigid body decentering degrees of freedom and a focus selector. The M4 Adaptive Unit has 4 sub-units:
- The 2.6 meters M4 Adaptive Mirror
- The M4 Positioning System
- The M4 Mounting Structure
- The M4 Control System
The main objective of the M4 Adaptive Mirror is to correct for real-time high order wavefront distortion produced by atmosphere, telescope wind shake and low spatial frequency errors. It has to compensate as well small amplitude fast residual tip-tilt correction left after the M5 field stabilization.The M4 Positioning System provide a first stage large amplitude low frequency tip-tilt correction and a pupil lateral correction to compensate for telescope gravity and thermal loads plus adapter tracking wooble and run-out errors. It provides finally the Nasmyth foci selector.
| Conditions | Requirements | |
|---|---|---|
Fitting error
|
Median seeing: 0.85" | 145 nm rms (goal 110) |
Temporal error
|
Median Seeing: tau0=2.5 ms at 1kHz wavefront sensor sampling frequency | 60 nm rms |
Telescope optical errors
|
Lowest 10 Zernike modes (excl tip, tilt, piston) | Maximum mechanical PV: 20 micron;Maximum update frequency: 1Hz;Maximum step amplitude PV: 1.5 micron |
Maximum average power
|
8 kW |
| Pupil lateral correction | |
|---|---|
Range (mm)
|
± 20 |
Min Continuous speed (mm/s)
|
1 |
Absolute accuracy (�m)
|
500 |
Resolution (�m)
|
50 |
| Mechanical Tilt Correction | |
Range (")
|
± 120 (± 14" on sky) |
Speed ("/s)
|
5 (0.6"/s on sky) |
Absolute accuracy (")
|
0.5 (0.06" on-sky) |
Resolution (")
|
0.27 (0.03" on-sky) |
Possible Technologies
Two competitive Studies have been launched in parallel in 2008. The project obtained from both companies a Demonstrator prototype fully tested and the M4 Adaptive Unit Preliminary Design document package in June-July 2010.
The design based on voice coil actuators technology was selected and a Preliminary design contract with the 39 meter EELT was kick-off in 2012. Preliminary design was successfully passed in April 2015.
Pictures
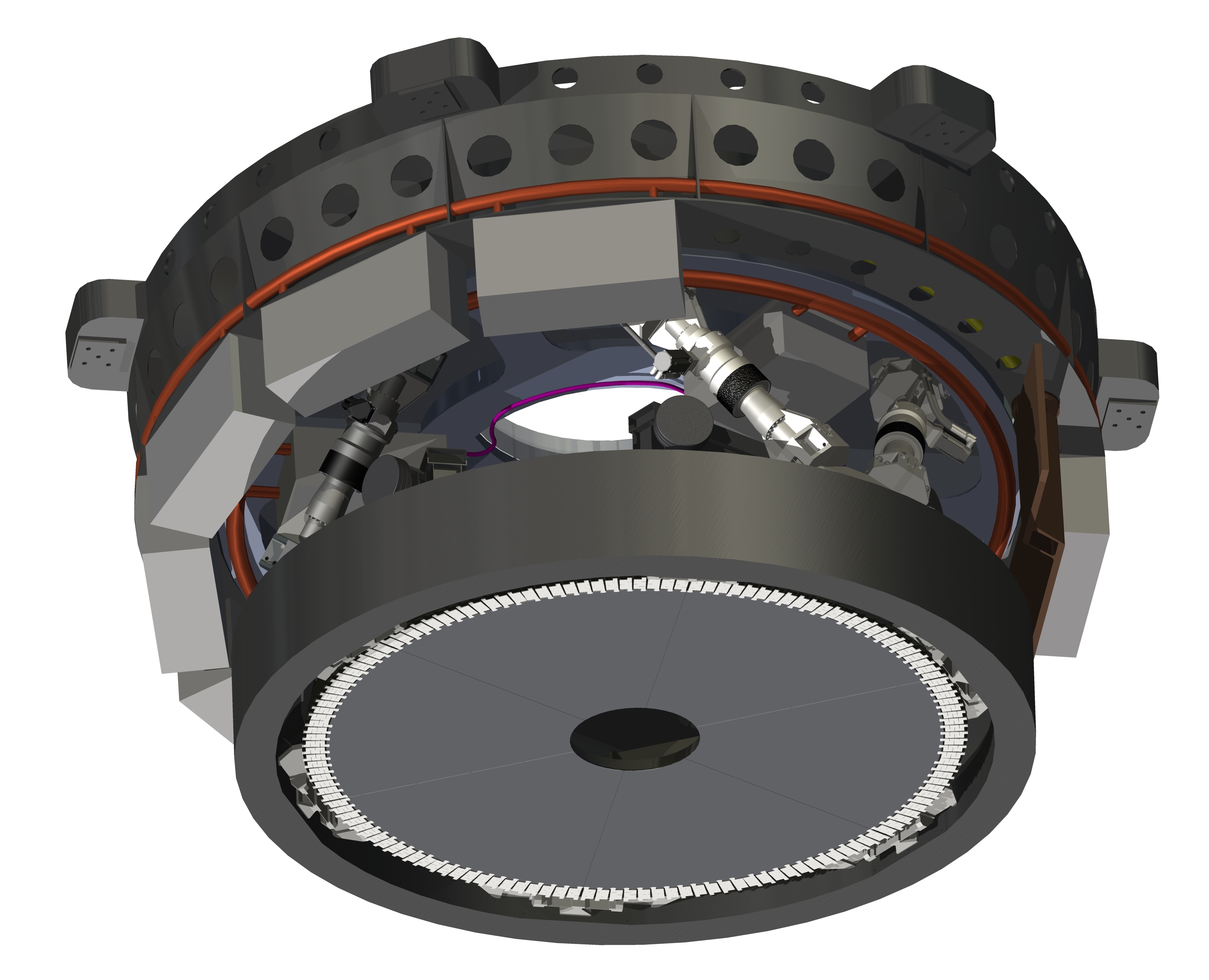 |
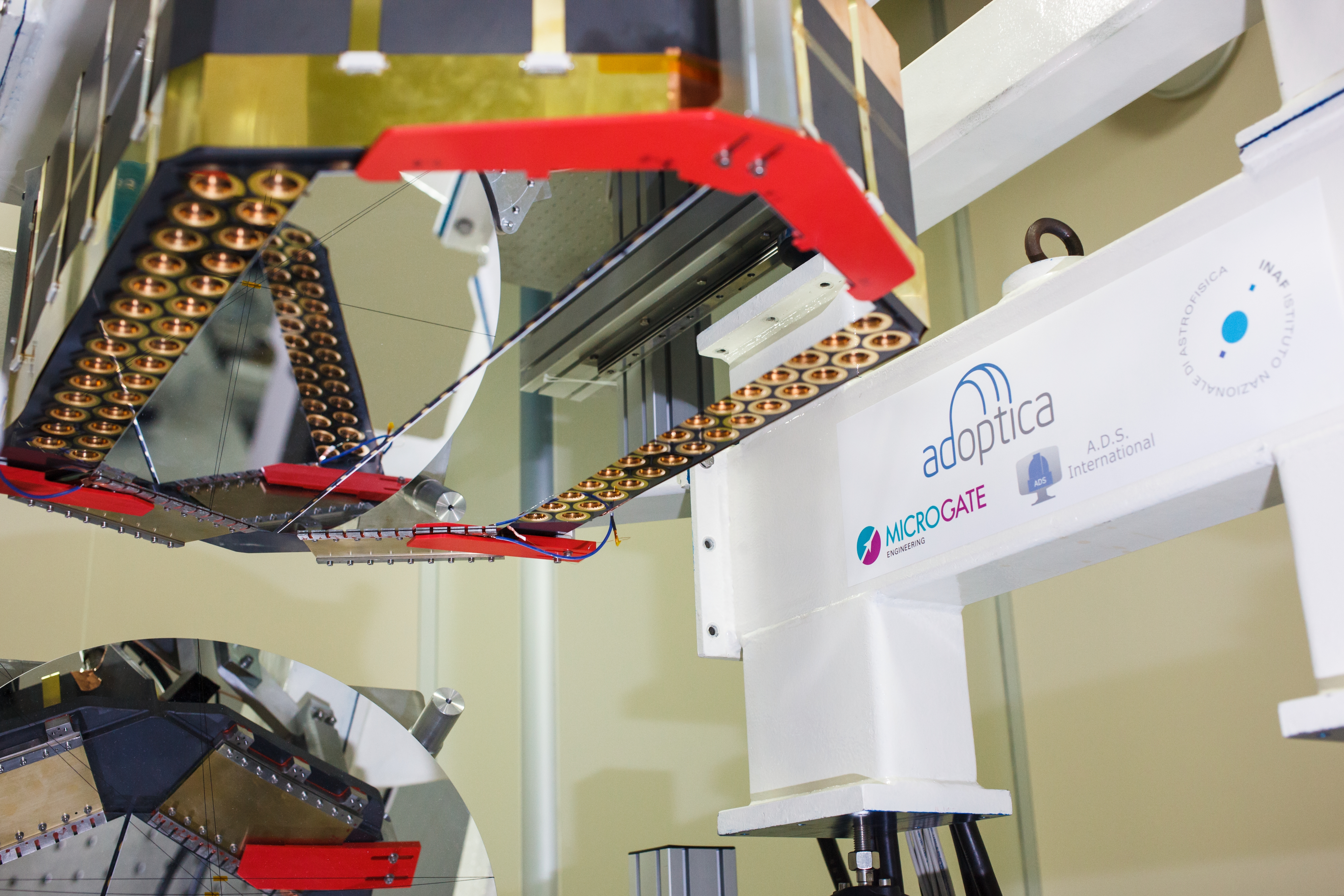 |
| M4 rendering (PDR design) | Demonstration prototype |
References
More information on Microgate design is available on Microgate webpage
What's new?
Check for the next lunch Talk.
Quick Links
- Home
- Adaptive Optics group expertise and activities
- Adaptive Optics Systems
- Adaptive Optics Technologies
- AO lunch talks
- Other useful links
Special Event: 20 years of Adaptive Optics at ESO
Contact Us